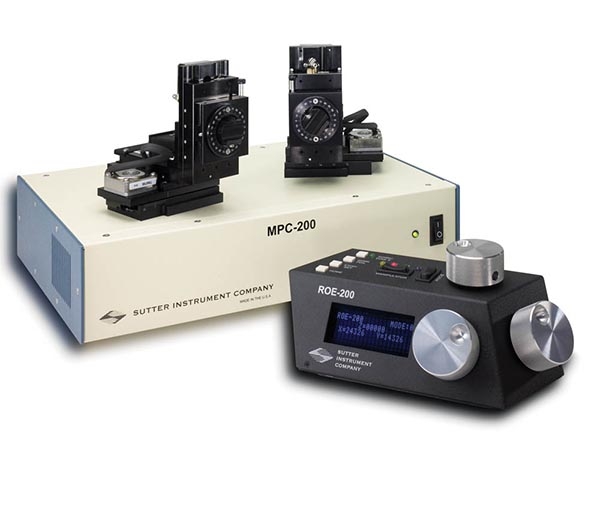
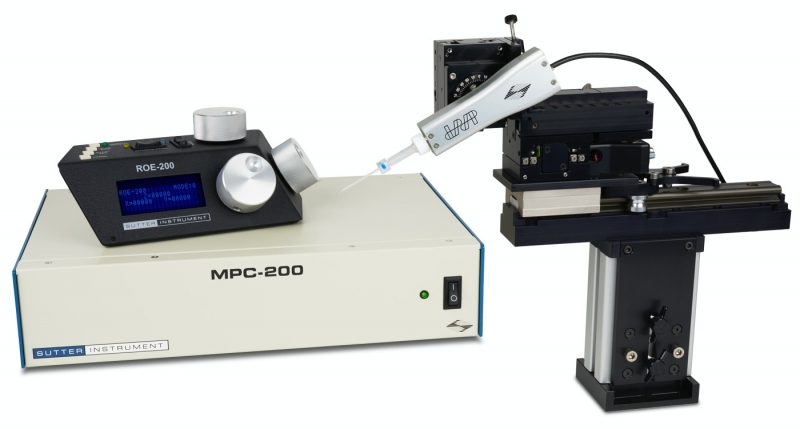
MPC-325系统由MPC-200控制器和一到四个MP-225微机械手组成。
MPC-200控制器和规则
神经生物学实验正变得越来越复杂。许多机器人需要有多个控制单元,这些控制单元很快就会变成空间和/或成本过高。MP-200是你一直要求的解决方案。一个能运行两个机器人的控制器!萨特仪器采用了MP-225控制器的简单性,并将其扩展为从一个控制器/子中运行两个操作器。与我们世界著名的机械品之一或两个,即MP-285(MP-385)、MP-225(MP-325)或窄格式的MP-862(MP-365)一起工作。
如果两个机械手不够的话,第二个控制器就可以被戴西锁起来,使单排200移动到四个机械手。因此,该系统可以很容易地扩展到控制高度复杂的实验。
萨特MC-200是电安静。与竞争不同,我们的多单元控制器采用线性输出电路。萨特将额外的机械手添加到同一个控制器上,而不需要潜在的噪音直升机驱动器。
在我们所有的机器人中,可以设置和改变第四轴,而不需要连接外部计算机来下载和配置软件。允许对这个机器人控制器上的每个输出进行单独的配置。如果需要的话,每个操作手都可以从不同的角度接近准备阶段。第四轴可以配置在X和Z轴之间,也可以配置在Y和Z轴之间(在机器人相对于制备旋转90度时有用)。
更快的自动管交换。MP-200有更快的"家"和"工作位置"的移动,以更快的管道交换。自动化是通过与MP-225控制器相同的接口建立和运行的,然而,自动化的移动速度要快得多。
加速手动模式。对于那些喜欢手动管交换的用户,我们已经增加了"加速模式"。使用加速模式,用户可以快速手动移动进出安装.加速模式通过在持续、快速的旋转过程中平稳地加速到最 大速度来扩大手动移动中可以达到的速度。当用户停止转动旋钮时,加速动作就会结束。对于那些认为需要直接控制管管的人,这种模式可以完全禁用。
微操作器
与MP-285和MP-365相比,MP-225机械手是一种经济的选择。2002年,生产和设计的改变使我们能够生产这种机动化机械手,作为一种更负担得起的工业标准MP-285的替代品。机械设计采用了微型步进电机和整体反冲击齿轮头。预装球轴承滑块在25mm的旅行中提供平稳的移动。在MP-225中保留了与MP-285相结合的用于安装吸管架和头级的方法,以允许交叉兼容。
任何时候都可以添加其他组件,允许用户开发适合其具体需要的系统。控制器是自检测,因此不需要手动配置的组件。