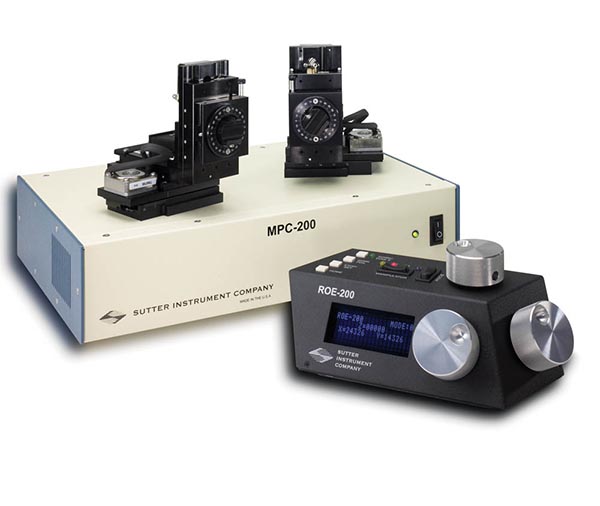
MPC-385系统由MPC-200控制器和一到四个MP-285微机器人组成。
MPC-200控制器和规则
神经生物学实验正变得越来越复杂。许多机器人需要有多个控制单元,这些控制单元很快就会变成空间和/或成本过高。MP-200是你一直要求的解决方案。一个能运行2到4个机器人的控制器。萨特仪器采用了MP-225控制器的简单性,并将其扩展为从一个控制器/子中运行两个操作器。与我们世界著名的机械品之一或两个,即MP-285(MP-385)、MP-225(MP-325)或窄格式的MP-862(MP-365)一起工作。
如果两个机械手不够的话,第二个控制器就可以被戴西锁起来,使单排200移动到四个机械手。因此,该系统可以很容易地扩展到控制高度复杂的实验。
萨特MC-200是电安静。与竞争不同,我们的多单元控制器采用线性输出电路。萨特向同一控制器添加了额外的操作器,而不需要潜在的噪音直升机驱动器。
在我们所有的机器人中,可以设置和改变第四轴,而不需要连接外部计算机来下载和配置软件。允许对这个机器人控制器上的每个输出进行单独的配置。如果需要的话,每个操作手都可以从不同的角度接近准备阶段。第四轴可以配置在X和Z轴之间,也可以配置在Y和Z轴之间(在机器人相对于制备旋转90度时有用)。
更快的自动管交换。MP-200有更快的"家"和"工作位置"的移动,以更快的管道交换。自动化是通过与MP-225控制器相同的接口建立和运行的,然而,自动化的移动速度要快得多。
加速手动模式。对于那些喜欢手动管交换的用户,我们已经增加了"加速模式"。使用加速模式,用户可以快速手动移动进出安装.加速模式通过在持续、快速的旋转过程中平稳地加速到最 大速度来扩大手动移动中可以达到的速度。当用户停止转动旋钮时,加速动作就会结束。对于那些认为需要直接控制管管的人,这种模式可以完全禁用。
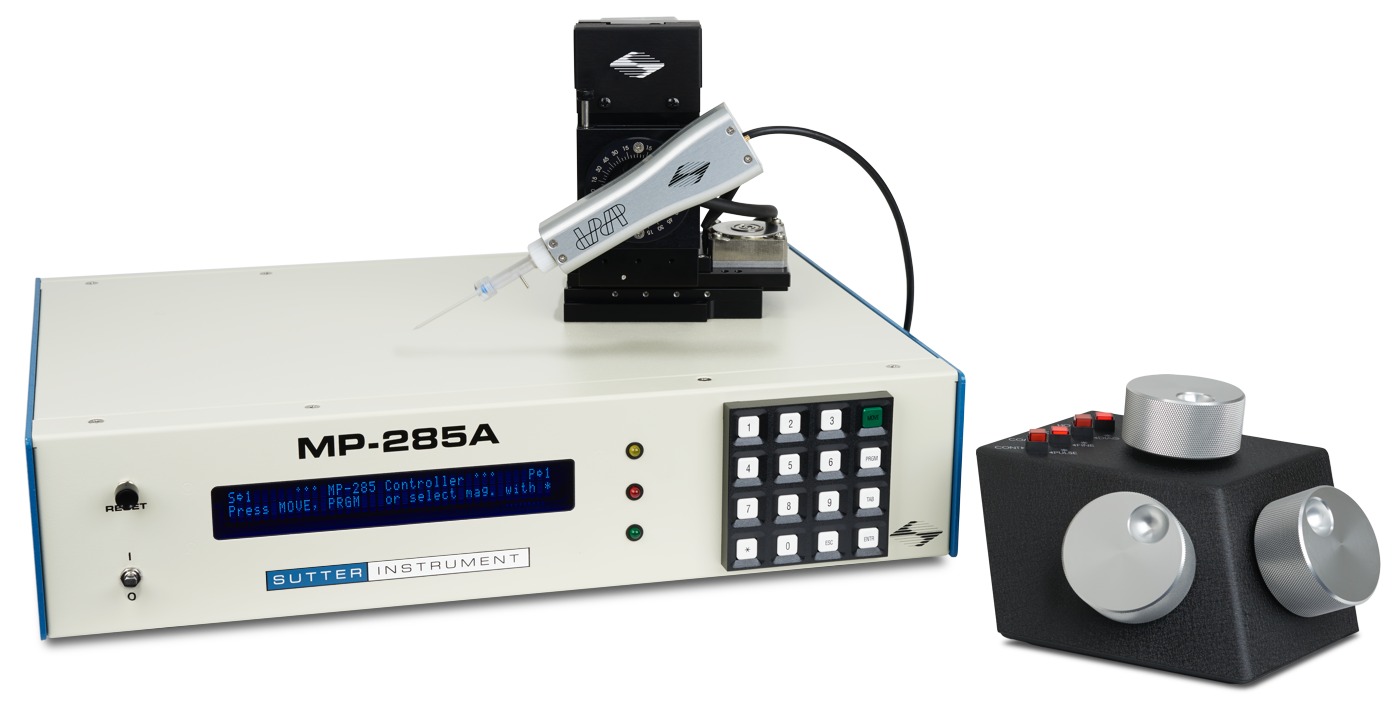
微机械手
在我们的精密机动微型机器人的生产线中,最早的一种,是MP-285机械提供了先进的功能,可以在花费几千美元的机器人中找到。定制工程步进电动机,精密交叉滚轴轴承滑块和专用的蠕虫轮绞盘驱动构成了监视式机械系统的基础。在我们的几个独特和坚硬的安装系统之一,管套和头级安全地安装到MP-285。
由于MP-285的极低反弹,消除了"开环"技术的传统缺陷,并消除了漂移现象。这使得亚微米分辨率在粗范围降到0.2微米,在细范围降到63纳米。在所有三个轴上有超过1英寸的机动车旅行,以及一个用户指定的第四轴,MP-285允许巨大的运动范围,同时最 大化分辨率。
任何时候都可以添加其他组件,使用户能够开发适合其具体需要的系统。控制器是自检测,因此不需要手动配置的组件。